In the Summer of 2022, GRYFN began its transition away from using DJI drones to carry its multimodal remote sensing packages. The UAV the company moved to is known as the FreeFly Alta X. FreeFly is an American based company that designs and assembles its UAVs in the US. Their product, known as the Alta X, was determined to fit the needs of GRYFN and its customers due to it being highly customizable to fit the needs of the end user. I was lucky enough to be the primary pilot this summer and was able to spend a great deal of time operating the aircraft.
With any transition to a new platform there is bound to be a learning curve, and unforeseen issues. FreeFly’s Alta X platform has shown to have pros and cons. After this first season with the platform however, it is safe to say that the Alta X is a well-built platform and the FreeFly company shows commitment to being open to feedback to help make their platform as good as possible.
Alta X
The physical construction of the Alta X is truly of a high degree of quality. The UAV is rugged, with no cracks, fractures, warping, or other damage having been noticed on the airframe over the course of the first operational season. The propellers of the UAV are also notably rugged. Early in the first few flights of the UAV with its smaller cargo style landing gear, the UAV would tip over and the propellers would dig into the ground. The propellers never sustained any damage, however. The propellers were free of any visible damage, and other than being covered in dirt, the propellers were still safe to remain in operation.
A physical issue noted is that of its antennas for connection to the controller. The antennas exist on the side of the UAV and twice this season became damaged due to wear caused by simply taking it in and out of its case. The UAV can operate in a normal capacity with just one antenna connecting to the transmitter, which is another point towards the ruggedness of the platform, however the antenna should fit better in the case.
Controller
GRYFN decided to use the TXMOD controller with the Alta X, as there is no standard first-party controller for the platform. The TXMOD controller from a physical standpoint was of acceptable quality. The controller feels rugged and secure in the hand. The back of the controller around the transmitter would get very hot at times, however the controller would never shutdown do to overheating. The screen on the controller also was easy enough to see even in direct sunlight, with minimal glare. The battery life was a small issue as the controller would typically only last for about four full flights or about one and a half hours of battery life.
Overall, it has been successful for the purpose of getting the platform in the air, doing an alignment, starting a mission, and returning. Things like battery life of the UAV, and error communication is lacking, however. Early in the season there was confusion of how to appropriately monitor the battery life of the UAV from the controller. The voltage readout can be nerve racking as the UAV loses battery quickly early in the flight, and over time the voltage starts to drop more slowly. After dozens of hours flying the platform, we were able to get an understanding of how long the UAV should be expected to fly.
Another strike against the TXMOD controller is its inability to accurately convey error messages. For instance, sometimes the UAV will refuse to arm itself, but you don’t get any other information than a message saying failed to arm or nothing at all. Other errors just appear on the tiny screen but give no other context. As an operator I want my main connection to the UAV to provide clear and consistent feedback.
Batteries
The Alta X does not have a proprietary battery and uses a standard XT-90 connector. GRYFN chose to use the Tattu Plus 1.0 Compact battery. Charging times for the batteries were reasonable, and no physical wear is noticeable on any of the batteries or cables. There is one noticeable issue, however. The issue is the status indicator lights on the battery. These lights are supposed to communicate some errors that may occur in the battery. However, these lights would be on at random times, and the UAV would in no way act any differently. The most common status to be falsely shown is that of both the Red and White LED’s being on which is supposed to indicate a “battery error”. These lights would sometimes be on, even right after removing them from the charging station. As previously mentioned though, there never were any impacts to operations due to the battery errors. This does not promote trust in the operator of the aircraft, because in the event there is a real error, it will be missed or dismissed because the lights have been providing false feedback.
Atla QGroundControl
For planning automated missions and conducting operations a FreeFly forked version of QGroundControl specifically for the Alta is recommended by FreeFly. This version had its pros and cons. In the middle of the season, we continuously had the error of the “.plan” file not updating properly. It was discovered that mission plans must have the correct altitude set initially when saving for the first time. Otherwise, the altitude may fail to update, and flight speed may also not be correct. Attempts to change characteristics in the field were not reliable otherwise. For flight planning the software was straightforward and easy with the software, except with some issues related to waypoints. Once again in the Alta version there were times when not inserting a long/lat value or inserting one greater than 90 would cause the software to lock up and you would have to start all over again from your last save if you had one. No issues like this occurred when creating survey missions or corridor scans.
Moving to just using the standalone original version of QGroundControl was seen to be a viable solution to no longer have the issues detailed above. This is primarily because the Alta version of QGroundControl is based off an almost 2-year-old version. In this transition, however, another lesson was learned. Flight plans developed in standard QGroundControl could not be opened in Alta QGroundControl. However, the inverse works without any issues.
Operations
UAV Setup/Takedown
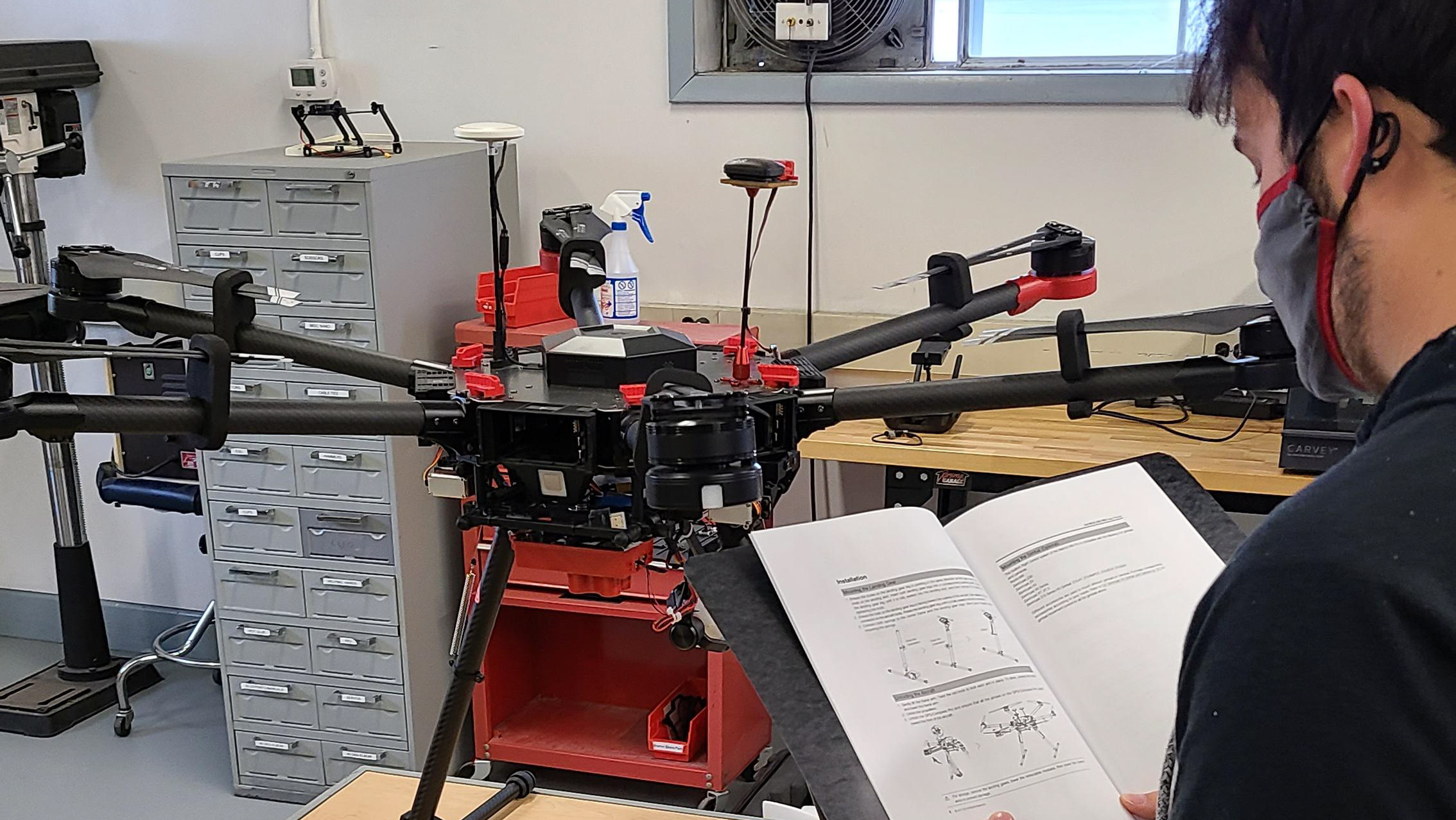
Setup and takedown of the Alta takes a noticeably longer time than with our previous M600. This comes down to two main differences. First, having to reattach/remove the landing gear every time adds some extra time. Secondly, having to attach the sensor payload each time also is an additional hassle that did not have to be endured last season. Attaching the landing gear is not quite seamless for one person as the best way is to flip the UAV over on top of the case. With having to attach the sensor package every time, there is no way to ensure it is 100% straight forward facing. This is not a major problem, but it will create some minor inconsistency in data collection.
In-Flight/Controls
The TXMOD controller was a bit divisive between different operators given the controller. The left stick does not center back on its own. The greater divisive issue though is that the left stick controls power to motors (or throttle) versus controlling altitude. This means that going down on the stick reduces the speed of the motors allowing it to reduce altitude more naturally, versus the more aggressive altitude control that DJI uses. With this controlling power to motors, this does mean pushing the stick all the way down would kill power to the motors causing the UAV to fall out of the sky. Operations we conduct do not benefit from having this type of advanced/refined control and I determined this to be an unnecessary additional risk during operations.
Battery Life
Operational flight time of the Alta X using similar payload as was used on the M600 saw a couple minutes increased in flight times. This allowed some missions to be completed in fewer flights than would be necessary when flying an M600. Only time will tell though how well the batteries hold up over multiple seasons. As seen with the M600 batteries, the total flight time went down over time.
Conclusion
After spending the season operating exclusively the Alta X, I believe the platform fits the needs of companies like GRYFN that need customizability in order to use custom sensors, especially multiple sesnors at once for multimodal datasets. The airframe is well designed and built with no major mechanical or electrical issues occurring over the course of the entire season. Its ability to handle higher wind speeds is very beneficial no matter the operation. This also extends to the increased payload capacity of the airframe. The flaws start to become exposed on the software and ease of use side of things. The mission planner, Alta QGroundControl, which FreeFly promotes currently is unacceptable with the issues it currently has. The current known issues make operations inconsistent and unreliable. This is of course subverted by using the most recently updated standard version of QGroundControl but this gets into the issues of ease of use for the platform.
There will continue to be a debate on whether UAVs should be treated more like airplanes/helicopters or toys. I believe that UAVs should not follow the traditional aviation industry, as the modern definition of a UAV was developed in a world of much more advanced technology. Ease of use should be a top factor of every commercial grade UAV. DJI has excelled at this for the better part of half a decade, and only continues to improve. Not having a first party standardized controller with integrated screen for mission planning and data collection purposes feels like a misstep. Of course, this leads to concern about proprietary lock-in, but relying on third-party controllers, and open-source mission planning software to conduct operations with your UAV leaves lots of room for error, that is in no way the aircraft’s fault.
This of course is the division of two kinds of focuses, however. Companies like Skydio are chasing the autonomous route completely but is stuck currently with a DJI Mavic sized aircraft, and FreeFly started with a much larger, versatile, and complex aircraft that is much more useful for many commercial businesses but lacks the refinement that opens itself up to more wary customers. I would love to see FreeFly’s future products work towards becoming more refined, and an overall “smarter”, but as it stands today the Alta X is a capable platform for commercial and research quality operations given that the team utlizing it are willing to work around some of its unrefined elements.